
Image of Motek Medical's CAREN system providing and actuated measurement treadmill for walking, running, and other human motion. We intended to design something similar for low speed single track vehicles.
Description
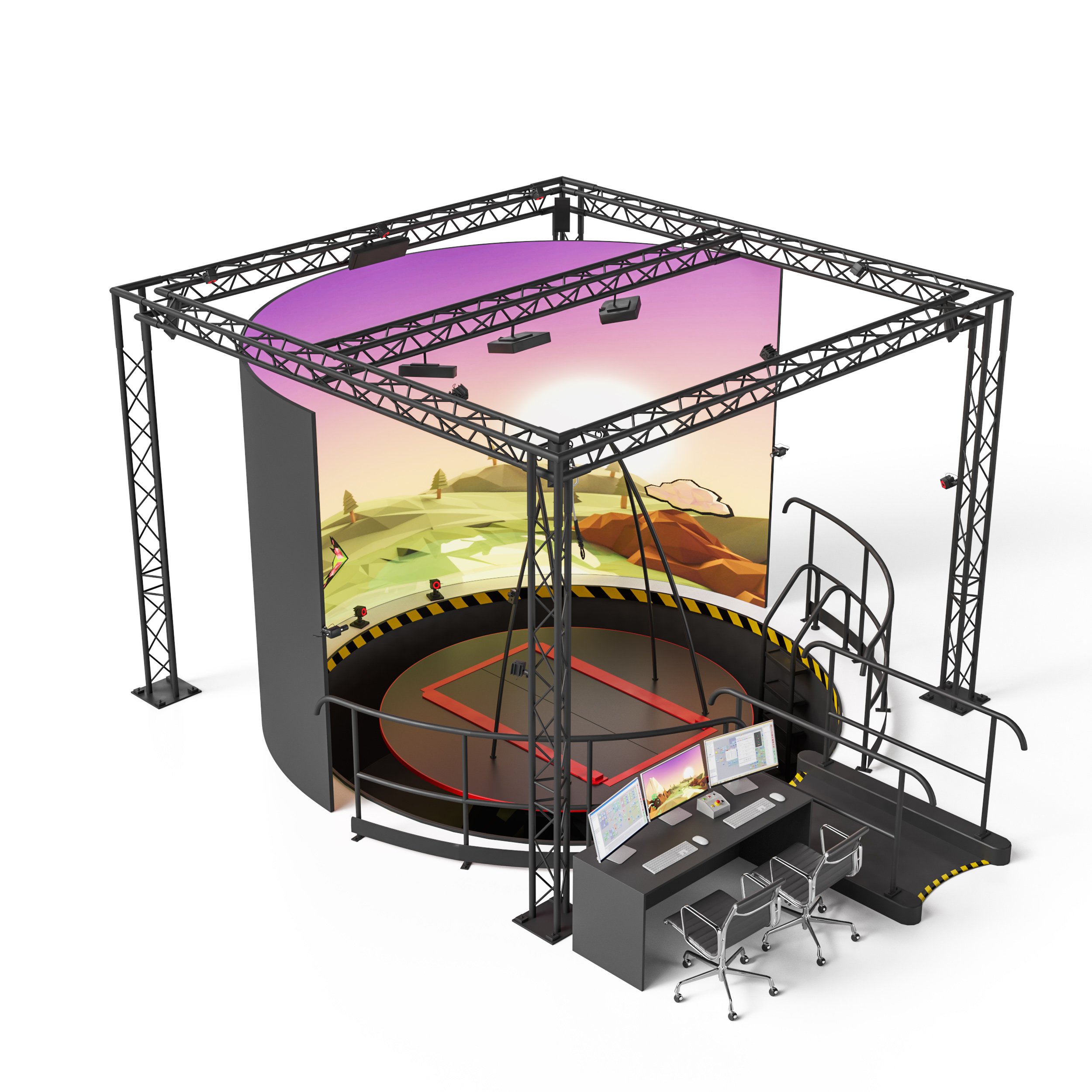
The bicycle lab is interested in developing an actuated treadmill for slow speed single track vehicle (bicycles, scooters, mopeds, motorcycles, etc.) balance and control experiments. To allow for maneuvers where a change in heading occur and measurement of ground reaction forces at each tire contact patch active control of a moving base treadmill is required. The desired system should have these features:
- dual, tandem forces plates under the treadmill belts capable of accurate lateral, longitudinal, and normal forces at each tire contact patch
- real time heading of the vehicle is accurately measured for use in a heading tracking controller
- the treadmill itself can yaw relative the fixed ground atop an actuated turn table
- a heading tracking controller that commands the treadmill's yaw angle to match that of the rider to an adequate bandwidth and amplitude for typical navigational heading changes
- (optionally) the ability to pitch the treadmill for longitudinal stabilization and/or for mimicking grade changes of terrain
The student will be responsible for ensuring that the heading dynamics are realistic (for limited heading maneuvers) for the bicycle rider. This will likely require limiting yaw accelerations and designing washout algorithms due to any machine limitations and mismatches with the actual dynamics of an on road experience.
How To Apply
If you would like to apply for this project, please send an approximately half page letter explaining your motivations and interest in the lab and project, CV or resume, a list of courses you've taken, the name of your MSc track, and any other relevant information to j.k.moore@tudelft.nl.