
Research
This research explores whether eye movements and bicycle motion can reveal how hard a cyclist is working when balancing — especially when riding with hands off the handlebars.
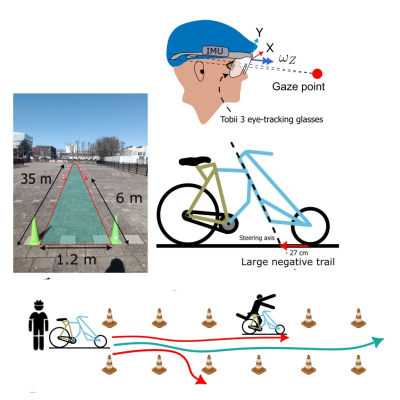
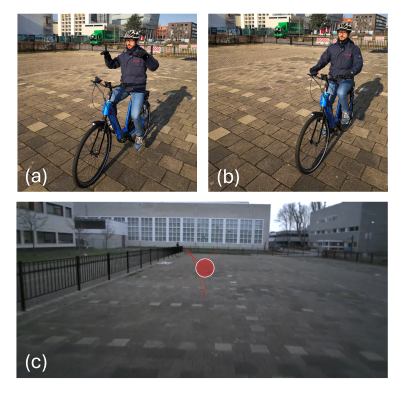
This project aims to characterize how cyclists adapt balance control and visual behavior while learning to balance a highly unstable bicycle. It investigates the relationship between subjective workload, head roll angular rate, and visual metrics (pupil diameter, saccade rate, fixation rate) to quantify learning progression and predict task success using logistic regression.
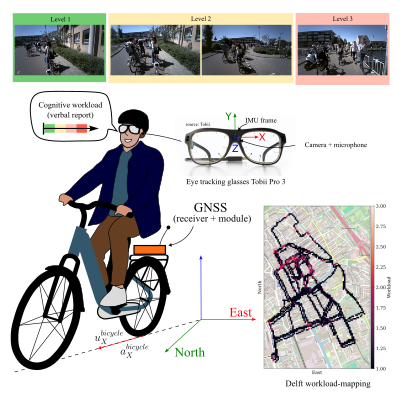
This project's goal is to connect the subjective cognitive workload of cyclists with gaze, head kinematics and vehicule kinematics metrics. This reseach investigate the possibiliy to predict the subjective workload based on objective metrics using machine learning methods.
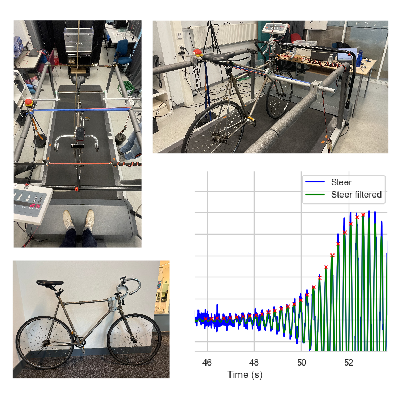
This study develops a controlled experimental platform to investigate how component stiffness influences bicycle dynamics — particularly the stability of intrinsic vibration modes, including the well-known wobble mode — using a parametric bicycle on a stabilized treadmill.

We have developed a bicycle with a electric steering motor that is capable of stabilizing itself at lower speeds than regular bicycles. When ridden this effect enhances the rider's balance at low speeds where falls often occur.

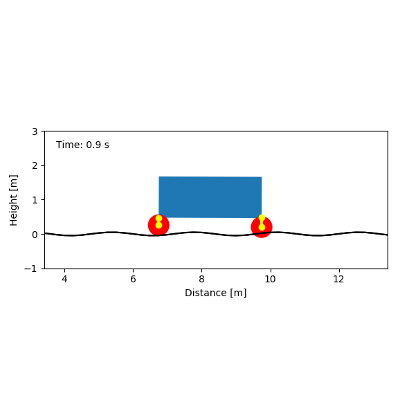
This project's goal is to characterize the vibrations experienced by babies and children during transportation in strollers and cargo bicycles with a eye towards consequences and improvements to health and comfort.
We aim to discover how critical riding situations end in single bicycle crashes, through the understanding of biomechanics involved in the phenomena.

We have developed a simulation model that predicts travel time and energy costs for a bicyclist traveling over an arbitrary route accounting for elevation changes, bicycle type, rider physiology, traffic signals, and yielding.

We are investigating the influence of bicycle dynamics on the traffic conflict process to improve traffic simulation models towards predictive safety assessment of infrastructure improvements, smart cycling assistance systems, connectivity, and automated driving.
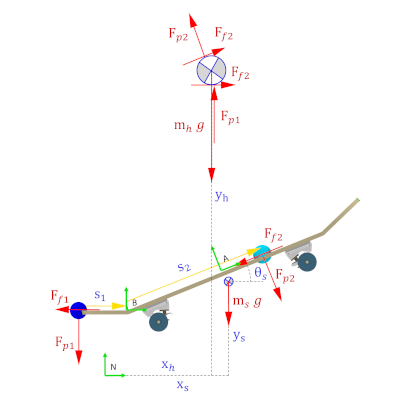
Skateboarders can perform complex tricks and maneuvers. Firstly, we are interested in figuring out how the skaters' manipulate and control the board and their body using optimal control methods. Secondly, we want to design the board and environment to maximize performance and safety.

Little safety driven engineering goes into the design and construction of ski and snowboard jumps in terrain parks at publicly accessible ski resorts. Catastrophic injuries and even deaths occur during skiing and snowboarding at these resorts. It is possible to design the landing surfaces of jumps such that the normal impact velocity on landing is capped at a safer value regardless of the jumper's takeoff speed and jump launch speed. These jump designs can still provide large maximum heights and flight durations for participant fun. We have designed a web application that laypeople can use to design and analyze ski jumps with specified equivalent fall height in mind.
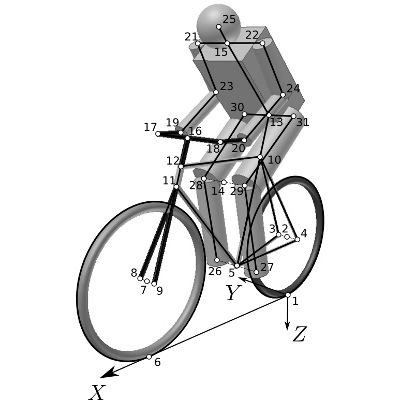
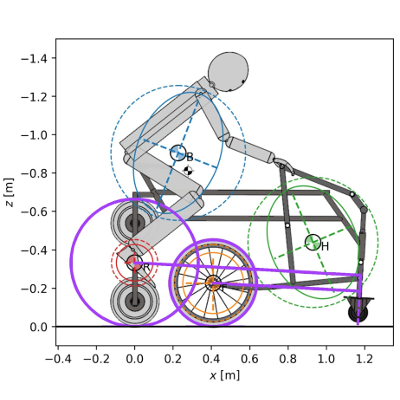
The purpose of this research is to establish methods for measuring and estimating the physical parameters of bicycles and bicycle riders necessary for simulating models of the bicycle-rider system.

We are interested in providing an interactive computing environments in online textbooks at a massive scale. LibreTexts is one of the largest and most visited online compendium of textbooks used in collegiate academics. The website currently serves mostly static and non-interactive content. We are working to enable Jupyter-backed interactive computation cells that authors can use to incorporate Python, R, Octave, and Sage generated media for pages. This will enable arbitrary visualizations and allow students to learn through computational oriented exercises.
"Computational thinking" is an alternative learning process for formulating and solving engineering problems. A unique set of abstractions are available to the learner in addition to those from mathematical and written language. We have developed an interactive textbook and problem sets using the Jupyter system of tools for 40 hours of in-class teaching and learning. These teaching materials are backed by a custom software library for mechanical vibrations designed to facilitate solving problems with computational thinking.

This project aims to validate this metric directly from experimental evidence in bicycling maneuvers and tasks. We have developed a variable stability instrumented bicycle and demonstrated preliminarily that that there may be correlations between our theoretical metric and the rider's subjective opinion of the bicycle's handling.
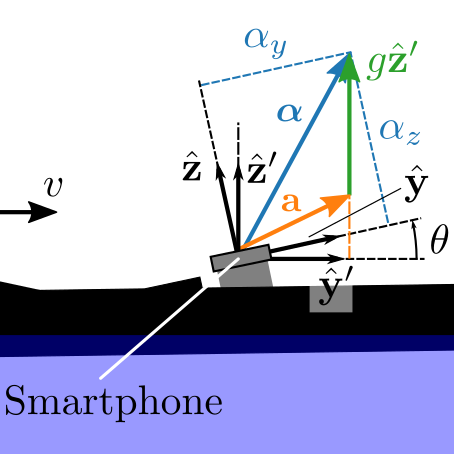
Real-time feedback of stroke-by-stroke rowing performance metrics can enable data driven training and coaching. Instrumenting rowers during training and competition with laboratory quality sensing is very difficult, but the ubiquity of smartphones provides an avenue to collect fewer and less accurate kinematic and kinetic measurements. This project aims to improve performance critical biomechanic rowing metrics through dynamics informed estimation algorithms. We have developed rower adaptive filtering methods to predict global boat position, speed, stroke rate, and distance per stroke at high accuracy and with experimental protocols for validating the estimations.
Our goal with this project is to develop metrics that quantify the handling, i.e. ease of control, of a bicycle or other single track vehicle and using these metrics develop methods for designing bicycles with specified handling characteristics. We have developed an optimization algorithm that can discover bicycle designs which maximize the lateral handling qualities of the vehicle. The algorithm currently produces less-than-intuitive but physically feasible bicycle designs. These methods can likely be extended to any human-machine system design.
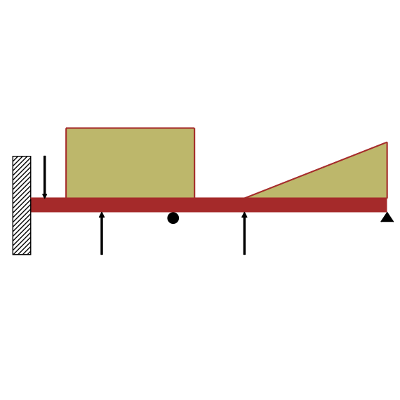
Mechanical and civil engineers utilize two- and three-dimensional theories of stress and strain to determine if structural beams will fail. Simple mathematical models can be used to make accurate predictions of failure due to shear, bending, and torsion stresses and due to deflection. Solving beam related problems typically involves integrating discontinuous functions and solving for boundary conditions. The integral calculus and algebra details often hide the trees for the woods. This project is centered around developing a package for SymPy that can be used to model and solve analytical beam problems, without getting bogged down in the mathematical details.
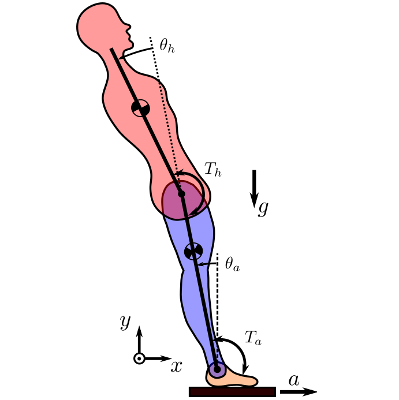
Humans unconsciously utilize a control strategy while standing. Visual, vestibular, and proprioceptive sensing inform the brain's control strategy which reacts to internally and environmentally produced perturbations. This is something humans are very good at but robots are bad at, thus if we can understand how humans accomplish this we can potentially design robots with biomimetic controllers. In laboratory settings we can accurately measure body segment kinematics, muscle activation levels, and ground force reactions during standing. Given all or subsets of this data collected during externally perturbed standing, we are interested in developing optimal control theories and methods of identifying the specific control strategy in use.
Programming is not just a way of translating well understood ideas into code; it is a tool for communicating, teaching, learning, and thinking. Students with basic programming skills can use coding as a "pedagogic lever" to learn other topics in engineering, math, natural and social science, arts and humanities.

We have developed a inexpensive centrifugal pump that attaches to a simple power takeoff on a Buffalo Bike. Our hypothesis is that a less efficient centrifugal pump paired with power generation from cycling will be overall more efficient than a more efficient positive displacement pump paired with stepping power generation. We have recently shown this to be true by accurately measuring the input biomechanical power and output hydraulic power from both systems to produce efficiency curves as a function of hydraulic load.

Analysis of comprehensive dynamical data during bicycling trips and activities has the potential to teach us much about travel behavior and safety of bicyclists. We would like to develop a open collaborative project with the aim of creating a modular, continually inexpensive, open source, and open hardware bicycle data logger.

Students developed a adaptive input device to enable persons with ALS or quadriplegia to control an electric tricycle.