Summary
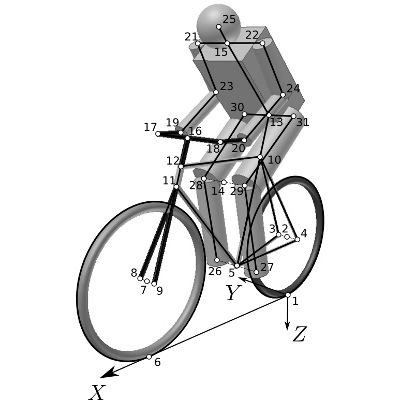
The purpose of this research is to establish methods for
measuring and estimating the physical parameters of bicycles
and bicycle riders necessary for simulating models of the
bicycle-rider system.
| Theme |
Bicycle Engineering |
Current Researchers |
|
| Last Worked On |
August 2020 |
Past Researchers |
Julie van Vlerken, Lyla Sanders, Chris Dembia |
|
|
Collaborators |
Mont Hubbard, Ronald Hess, Chris Dembia, Arend Schwab, Jodi
Kooijman |
In [Moore2008] we developed and used a method for estimating the inertial
properties of the bicycle and rider given simple geometric measurements. The
rider method in [Moore2008] was formalized in [Moore2009] and combined with
more accurate measures and estimates of the bicycle's physical parameters based
on the methods used in [Kooijman2006]. We presented estimates of the physical
parameters of several different styles of bicycles in [Moore2010] and compared
their resulting dynamics. Then in [Moore2012] the prior work was further
refined and included measurements of additional bicycles and a new method for
estimating the rider's inertial parameters. The generalized human inertia
estimation method used in [Moore2012] was published in [Dembia2015]. The
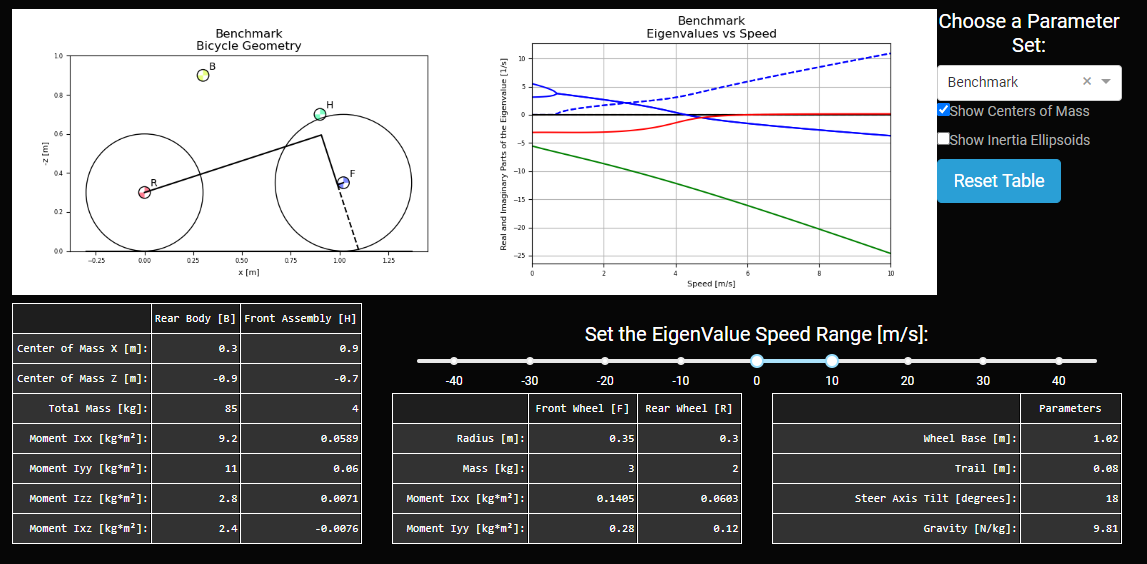
software [Moore2011] used for the computations has been developed over the
years and basic functionality is now available in a freely accessible web
application:
Products
- J. K. Moore, C. Dembia, and O. Lee, BicycleParameters: A Python library for
bicycle parameter estimation and analysis. 2011.
- C. Dembia, J. K. Moore, S. Yin, and O. Lee, Yeadon: A Python Library For
Human Inertia Estimation. 2011.
Funding
This material is partially based upon work supported by the National Science
Foundation under Grant No. 0928339. Any opinions,
findings, and conclusions or recommendations expressed in this material are
those of the authors and do not necessarily reflect the views of the National
Science Foundation.
References
| [Kooijman2006] | J. D. G. Kooijman. Experimental validation of a model for the
motion of an uncontrolled bicycle. Master’s thesis, Delft University of
Technology, 2006. |
| [Moore2009] | J. K. Moore, J. D. G. Kooijman, M. Hubbard, and A. L. Schwab, "A
Method for Estimating Physical Properties of a Combined Bicycle and Rider,"
presented at the ASME 2009 International Design Engineering Technical
Conferences & Computers and Information in Engineering Conference, IDETC/CIE
2009, San Diego, CA, USA, Aug. 2009, https://dx.doi.org/10.1115/DETC2009-86947. |
| [Moore2010] | Jason K. Moore et al. An Accurate Method of Measuring and Comparing a
Bicycle's Physical Parameters". In: Proceedings of Bicycle and Motorcycle
Dynamics: Symposium on the Dynamics and Control of Single Track Vehicles.
Delft, Netherlands, Oct. 2010. |