
Summary
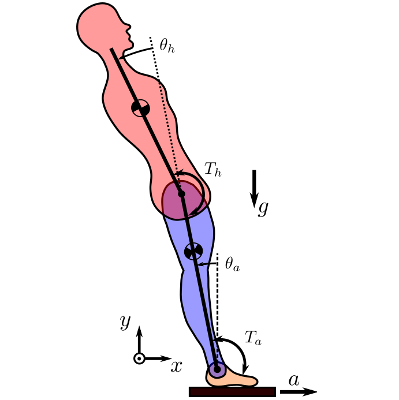
Humans unconsciously utilize a control strategy while standing. Visual, vestibular, and proprioceptive sensing inform the brain's control strategy which reacts to internally and environmentally produced perturbations. This is something humans are very good at but robots are bad at, thus if we can understand how humans accomplish this we can potentially design robots with biomimetic controllers. In laboratory settings we can accurately measure body segment kinematics, muscle activation levels, and ground force reactions during standing. Given all or subsets of this data collected during externally perturbed standing, we are interested in developing optimal control theories and methods of identifying the specific control strategy in use.
| Theme | Human Control Identification | Current Researchers | |
| Last Worked On | February 2019 | Past Researchers | Dorian Crutcher, Jonathan Cubanski, Todd Sweeney, Greg McDonald, Jiahao Wei, Erich Baur, Kendall Lui, Stanley Tsang, Chenxiong Yi, Rouxi Peng |
| Collaborators | Ton van den Bogert (Cleveland State University) |
Humans unconsciously utilize a control strategy while standing. Visual, vestibular, and proprioceptive sensing inform the brain's control strategy which reacts to internally and environmentally produced perturbations. This is something humans are very good at but robots are bad at, thus if we can understand how humans accomplish this we can potentially design robots with biomimetic controllers. In laboratory settings we can accurately measure body segment kinematics, muscle activation levels, and ground force reactions during standing. Given all or subsets of this data collected during externally perturbed standing, we are interested in developing optimal control theories and methods of identifying the specific control strategy in use. We have developed parameter identification methods using direct collocation to identify the controllers used in simulated standing [1]. The general optimal control and parameter estimation methods used have been formalized in the software, Opty [2]. We are currently developing a small desktop "double pendulum on a cart" robot to verify and improve the control identification methods. The robot will allow us to measure the motion during perturbed balancing which is a result of known programmed control strategies.
| [1] | Moore, Jason K., and Antonie J. van den Bogert. "Quiet Standing Control Parameter Identification with Direct Collocation." In XV International Symposium on Computer Simulation in Biomechanics. Edinburgh, UK, 2015. |
| [2] | Jason K. Moore, and Antonie van den Bogert. "Opty: Software for Trajectory Optimization and Parameter Identification Using Direct Collocation." Journal of Open Source Software 3, no. 21 (2018): 300. https://doi.org/10.21105/joss.00300. |
Associated Research Products
Standing balance control identification with opty: https://opty.readthedocs.io/stable/examples/advanced/plot_park2004.html
Blog posts: