
Summary
Real-time feedback of stroke-by-stroke rowing performance metrics can enable data driven training and coaching. Instrumenting rowers during training and competition with laboratory quality sensing is very difficult, but the ubiquity of smartphones provides an avenue to collect fewer and less accurate kinematic and kinetic measurements. This project aims to improve performance critical biomechanic rowing metrics through dynamics informed estimation algorithms. We have developed rower adaptive filtering methods to predict global boat position, speed, stroke rate, and distance per stroke at high accuracy and with experimental protocols for validating the estimations.
| Theme | Sports Engineering | Current Researchers | |
| Last Worked On | December 2019 | Past Researchers | Bryn Cloud, Britt Tarien, Thomas Shedd, Ada Liu, Li Wang |
| Collaborators | Mont Hubbard, Paul Crawford, Xinfan Lin, Seth Weil |
Description
The purpose of this project was to develop methods to estimate important rowing performance metrics using data collected from sensors in a smartphone: rate gyros, accelerometers, magnetometer, and GPS. We simultaneously collected data during typical single scull rowing from smartphones attached to the boat and a differential GPS antennae. We showed that "distance per stroke" estimates could be improved with the use of either a complementary filter or Kalman filter with mean errors dropping to around 0.5 meter or less using the filters. The accuracy and frequency of the GPS measurements from the smartphone is the primary factor preventing these estimates from being closer to 5 centimeters; a threshold to make the estimates useful for analyzing performance on a stroke-by-stroke basis. More advanced filters might improve the estimates, but improvements in smartphone sensors and the associated GPS network might be the best way to obtain desirable estimates. The results were published in PLoS One in 2019. The abstract reads:
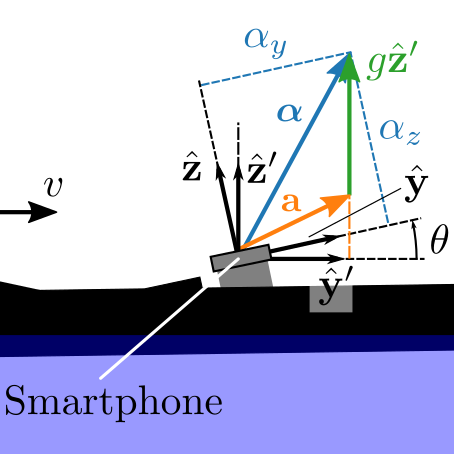
Competitive rowing highly values boat position and velocity data for real-time feedback during training, racing and post-training analysis. The ubiquity of smartphones with embedded position (GPS) and motion (accelerometer) sensors motivates their possible use in these tasks. In this paper, we investigate the use of two real-time digital filters to achieve highly accurate yet reasonably priced measurements of boat speed and distance traveled. Both filters combine acceleration and location data to estimate boat distance and speed; the first using a complementary frequency response-based filter technique, the second with a Kalman filter formalism that includes adaptive, real-time estimates of effective accelerometer bias. The estimates of distance and speed from both filters were validated and compared with accurate reference data from a differential GPS system with better than 1 cm precision and a 5 Hz update rate, in experiments using two subjects (an experienced club-level rower and an elite rower) in two different boats on a 300 m course. Compared with single channel (smartphone GPS only) measures of distance and speed, the complementary filter improved the accuracy and precision of boat speed, boat distance traveled, and distance per stroke by 44%, 42%, and 73%, respectively, while the Kalman filter improved the accuracy and precision of boat speed, boat distance traveled, and distance per stroke by 48%, 22%, and 82%, respectively. Both filters demonstrate promise as general purpose methods to substantially improve estimates of important rowing performance metrics.
Associated Research Products
- Journal article: Cloud B, Tarien B, Liu A, Shedd T, Lin X, Hubbard M, et al. (2019) Adaptive smartphone-based sensor fusion for estimating competitive rowing kinematic metrics. PLoS ONE 14(12): e0225690. https://doi.org/10.1371/journal.pone.0225690
- Preprint article: https://engrxiv.org/nykuh/
- Software repository: https://gitlab.com/mechmotum/row_filter
- Software archive: http://doi.org/10.5281/zenodo.3378965
- Data: https://doi.org/10.6084/m9.figshare.7963643.v2
- Blog posts:
Media

Seth Weil during his trials with annotations indicating the equipment on the boat.
A video of the club-level rower during the data collection:
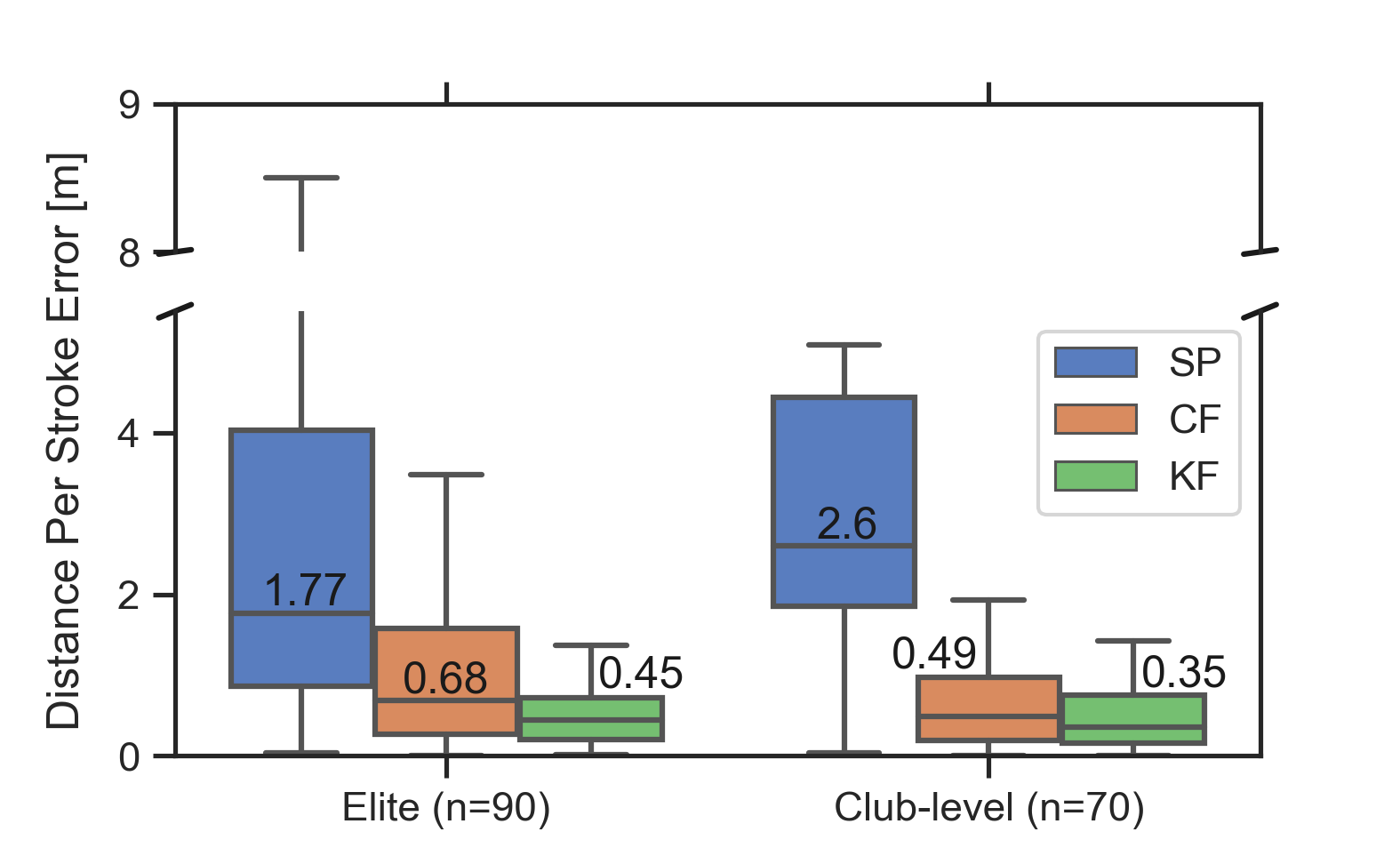
Final results showing the improvements in the distance per stroke estimates for the complementary filter (CF) and Kalman filter (KF) as compared to the estimates from the raw smartphone data (SP).

Research team members Li Wang, Ada Liu, Thomas Shedd, Paul Crawford, Britt Tarien, and Bryn Cloud