
- Thu 19 March 2026
- news
- Jason K. Moore
- #cycling, #behavior, #overtake, #mpc, #optimal control
 |
 |
Yuke Huang successfully defended her MSc Thesis titled Adaptive-Horizon Model Predictive Control for Modeling Anticipative Behavior in Cyclist Interaction on March 18, 2026.
Yuke developed a cyclist navigation controller representing the cyclist's heading control loop using adaptive-horizon model predictive control. This adaptive-horizon element was introduced to capture a hypothesized change in reactive behavior when closer or further to another cyclist. She extracted pairwise cyclist overtaking data from a public dataset of cyclists in a German city and formulated an optimal control cost function that took into account following a desired path, maintaining speed, avoiding collision with the other cyclist, and minimizing large motions and control inputs. She calibrated the model on the data with Bayesian optimization first assuming a constant MPC horizon and then showing that more realistic simulated motion occurs if the horizon is variable throughout the overtaking maneuver, supporting the hypothesis that we shorten our internal planning horizon when closer to obstacles. She showed that we have a minimum horizon and that we use that minimum when closest to the other cyclist.
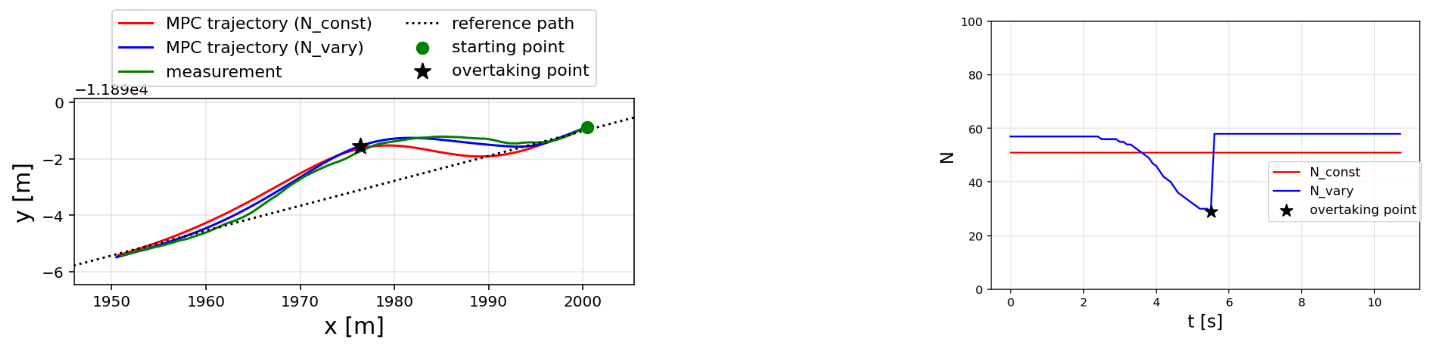
Example result of simulating an overtaking maneuver with a constant horizon and adaptive horizon MPC controller, showing the adaptive controller better simualtes the cyclist's behavior.
Yuke was supervised by Christoph Konrad, Azita Dabiri, and Jason K. Moore with help from Riender Happee. Everyone at the bicycle lab is very proud of Yuke and wishes her the best with her upcoming PhD position in Eindhoven.